打开文本图片集
摘要:指出了伴随着中国大气环境空气质量日益受到重视,仅依赖地面点式抽取式仪器监测已不能满足当今监测所需。颗粒物激光雷达基于其远距离探测能力,高时空分辨率等特点,正逐渐被广泛应用于大气环境立体监测。结合当前环境监测业务的需要,颗粒物激光雷达在环境监测方面不仅仅局限于以前的固定点垂直对天的遥感监测,同时也在往多角度,多监测模式更贴近实际监测业务的方向发展。对颗粒物激光雷达在环境监测多重应用方式进行了探讨研究,以期提供参考。
关键词:颗粒物;激光雷达;环境;消光系数
中图分类号:TN958.981
文献标识码:A
文章编号:1674-9944(2018)10-0122-03
1引言
近年来,伴随经济的快速发展,城市大气环境污染问题也日益突出,国家及地方政府对环境污染监测及治理高度重视,出台了大量的相关政策、标准及法规,引进了各种先进监测技术手段,并在全国范围内建设了大量的空气质量监测站点。然而大气污染并非是一种一直滞留在某地的单一污染源,污染团存在从一个区域向另一个区域动态扩散现象。当前空气质量监测站点监测出来的数据只能代表某一个小片区的空气质量,并不能探测出污染源及污染物传输方向。鉴于污染团存在空间分布差异性及区域扩散性,仅通过空气质量监测站点数据暂无法说清污染团的高度分布以及它的扩散情况。通过颗粒物激光雷达的高实效性、大空间尺度探测,可发快速现城市区域污染源分布情况以及不同高度层污染分布情况,实现对城市区域空气质量的综合立体评估。
基于激光雷达在大气探测方面的优越性,激光雷达立体探测技术得到快速推广应用。由于各个业务部门及各种现场监测目的的差异性,颗粒物激光雷达立体探测方式衍生出各种差异化的应用。本研究将重点介绍颗粒物激光雷达在大气环境监测领域的多样性应用。
2激光雷达探测技术
现代激光因具备实时性高、单色性佳及指向性好的特点,被应用于雷达探测领域,与传统雷达遥感技术相结合,进而衍生出激光雷达探测技术。
2.1激光雷达探测原理
通过利用接收激光雷达雷达系统发射的脉冲激光与大气中各种分子和气溶胶等介质相互作用产生的辐射信号反演出大气的相关特性。
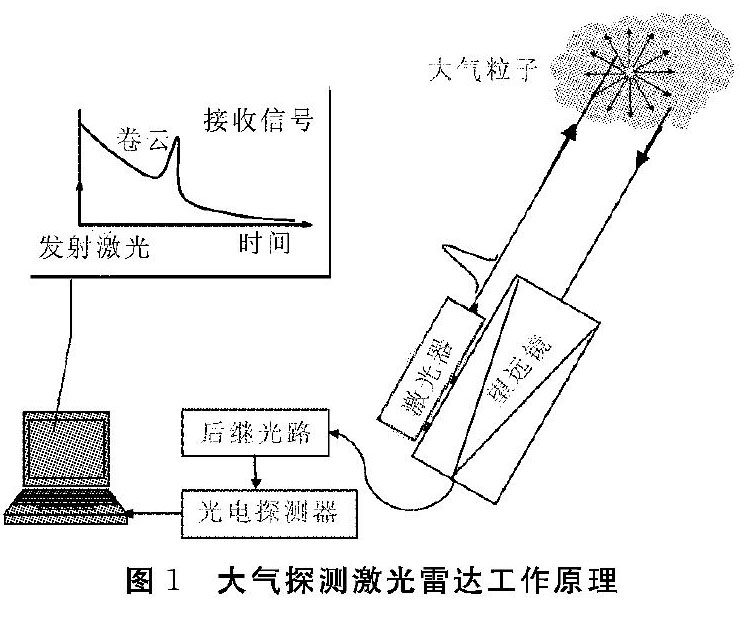
激光雷达的脉冲激光器向空中发射一束激光脉冲,该脉冲光在大气传播过程中,将会不断地与大气中的粒子(包含大气分子及气溶胶)发生相互作用而产生散射光,此光中所含的后向散射光信号将被望远镜接收,经过光电转换器件及信号处理电路的转换及处理后得到激光雷达探测到的大气回波信号,再结合激光雷达方程繁衍出颗粒物。
2.2激光雷达系统构成
激光雷达系统基本由4部分组成:激光发射系统、接收系统、信号采集与处理系统。其中激光发射系统包含的核心部件有激光器及扩束准直器。激光器为雷达系统中的光源,其发射脉冲激光,准直器一般用于对激光进行准直扩束。接收系统主要有望远镜及后继光学单元组成。望远镜接收大气粒子对激光的后向散射光信号。后继光学单元将会对望远镜所接收到的光进行整形分光。信号采集与处理系统的职责是进行光电转换及电信号的放大滤波。光电转换主要由PMT或APD等探测器来完成。信号处理涵盖对回波信号的数据反演,解析成可读性强的图谱。激光雷达利用这三大部件实现对大气粒子浓度、形状等信息的解析反演。
3激光雷达多重应用分析
伴随大气监测的差异化需求,基于激光雷达遥感监测技术衍生出激光雷达定点垂直探测、水平扫描探测、走航探测、组网探测等多重应用,获取到大气中粒子各种分布信息。
3.1激光雷达定点垂直探测
此种探测应用手段为激光雷达最早采用的技术手段。最早激光雷达安装于监测站房内,对房顶开设天窗孔,激光雷达发射的脉冲激光通过天窗口垂直射向大气,望远镜接收垂直向下的后向散射信号,结合雷达方程繁衍出此监测站点上空的大气粒子随时间变化,不同高度上的浓度及形状变化情况,如图2、3所示。
结合图2激光雷达定点垂直探测532消光图谱,可以快速获取到此激光雷达安装点位上空2018年3月27日0:00~15:00时段3.5km内不同高度的颗粒物消光数据,进而掌握不同高度的颗粒物的浓度分布情况。同时,结合图3激光雷达定点垂直探测532退偏振比图谱,可以获取到2018年3月27日0:00~15:00时段3.5km内不同高度的颗粒物退偏振比数据,进而掌握不同高度的颗粒物的形状特征。
3.2激光雷达水平扫描探测
对于中底层大气的污染传输团,可以通过激光雷达定点垂直探测方式来捕捉。但对于当前环境监测的实际需求来看,对于城区污染水平分布的掌握更为急迫。通过获取污染源的具体地理位置分布,环保部门能够为当地政府对污染源的管控提供有力数据支撑。将水平扫描监测与GIS结合,可将激光雷达扫描结果实时直观呈现给用户,让用户快速确认污染及污染源地理位置,如图4所示。
图4为激光雷达水平扫描探测消光图谱,图谱中将污染点源及污染传输带分布直观的呈现在GIS地图上。消光系数δhom与p(PM10)存在一定关系,结合胡欢陵等在北京实测分析结果,得到两者关系式为PM10=AδBhom,其中A=322.38,B=0.91。因此由图4消光图谱的颜色深浅,可以确认出此污染点源在整个监测范围内污染浓度最大。通过对此图谱进行稍加解读即可获取到污染源及污染带的地理位置,环保部门再结合实地考证,即可确认排放源的类型。
3.3激光雷达走航探测
将激光雷达立体监测技术与监测车结合(将此监测技术移植至车上),实现移动走航监测。通过利用车的机动灵活性,以及激光雷达的实时监测性,并结合3维GIS地图,再结合风速风向数据可实现对气溶胶污染来源的快速追踪监测。
结合图5走航探测消光图谱,通过走航探测,可以掌握不同城区间污染浓度状态。从图5可以看出地图东南角的城区污染相比西北角的郊区污染明显重很多,且伴随由东向西行驶,污染浓度在主机按降低。可以看出污染主要集中在近地面位置,主要受人的生产生活带来的排放影响。
3.4激光雷达组网探测
近些年来,为了适应全球气候和环境变化研究,获取大气成分空间分布和时间演变资料,国际上已陆续建立了一些探测大气成分物理化学性质的激光雷达观测网,比较重要的有欧洲气溶胶研究激光雷达观测网、全球大气成分变化探测网以及独联体激光雷达网等。这些雷达网对雷达数据及反演方法上进行了统一规范,保证了大气成分探测数据质量的有效性及可比性。
伴随大气立体监测技术的快速推广应用,我国在各地布设的垂直探测雷达越来越多,国家也逐步在开展相关激光雷达标准规范。在建立激光雷达标准规范后,将全国各地的激光雷达进行联网组网,最终形成我国的激光雷达立体监测网,可以对污染团及沙团的传输路径、时间相位以及沉降的特征进行监控,并及时预警。
4结语
颗粒物激光雷达立体监测技术正得到广泛实际应用。伴随环境气象监测业务的需要,颗粒物激光雷达的应用方式也逐渐多元化。激光雷达定点垂直探测、水平扫描探测、走航探测、组网探测等这类的多重应用为大气监测提供了更为丰富的数据源,同时也大大拓宽了现阶段监测技术所探索的空间领域。伴随我国相关标准的制定,这种大尺度的探测技术也将逐步成熟规范,为我国的大气监测提供更为有力的数据支撑。
參考文献:
[1]刘东,陶宗明,吴德成,等.三波长拉曼偏振激光雷达系统研制及探测[J].光学学报,2013,33(2):230~235.
[2]贺应红.Mie散射激光雷达实验系统设计与大气消光系数反演方法研究[D].成都:四川大学,2004.
[3]胡欢陵,吴永华,谢晨波,等.北京地区夏冬季颗粒物污染边界层的激光雷达观测[J].大气科学环境研究,2004,7(1):59~66.
[4]张大毛,徐赤东,虞统,等.扫描式微脉冲激光雷达的研制和应用[J].大气与环境光学学报,2006,1(1):47~52.
[5]王英俭,胡顺星,周军,等,激光雷达大气参数测量[M].北京:科学出版社,2014:384.
[6]李立忠,朱璐,金焰,等,黄石市大气颗粒物的特征分析[J].中南民族大学学报(自然科学版),2017(4):14~16.






